

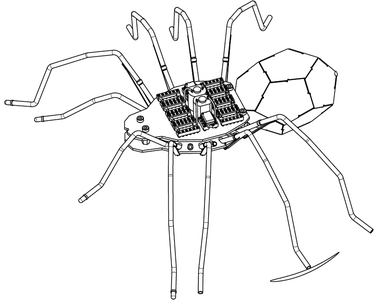
Unser neuer Blogeintrag widmet sich der Roboter-Spinne „spido“. Nach der Entwicklung „tibos“, unseres ersten, fahrenden Roboters, soll als nächstes Produkt „spido“ die Serienreife erreichen. Chefentwickler Tino Werner ist seit seiner Schulzeit beseelt von der Vorstellung einer lebensechten Roboterspinne.

Während „tibo“ – als fahrender Roboter konzipiert – über einen einfachen mechanischen Aufbau verfügt, stellt die Spinne die Entwickler auf mehreren Ebenen vor neue Herausforderungen (Entwicklungsgeschichte). Als bionischer Roboter simuliert „spido“ nun auch Bewegungsabläufe aus der Natur. Obwohl es nach komplexen Mechanismen aussieht, werden einfache Bewegungsprinzipien verwendet.
Drei wesentliche Innovationen, die „spido“ besonders machen:
-
Sensorik: präzise Navigation durch den patentierten Sensorenverbund und ermittelte
Relativwerte
-
Steuerung: die variable, analoge Steuerung eröffnet zahlreiche Bewegungsmöglichkeiten
- Mechanik: der Laufmechanismus wirkt lebensecht und funktioniert mit minimalem technischen Aufwand

Patentierte Kinematik bringt Spinne voran

„spido“ nutzt – ebenso wie „tibo“ – eine variable, analoge Steuerschaltung. Um die Bewegungen einer echten Spinne so realistisch wie möglich abzubilden, entwickelten wir eine spezielle Kinematik und meldeten sie 2013 zum Patent an. Diese markiert für uns einen Einschnitt in der Roboterentwicklung, denn sie ermöglicht eine neue Art von autonomen Roboterleben. Eine Besonderheit bei der Spinne ist der verhältnismäßig kleine Körper, der sich auf langen schlanken Beinen befindet. Die neue Kinematik haben wir entwickelt, um genau das zu erreichen.
Der Körper muss stabil, darf aber nicht schwer sein. Der Schreitmechanismus soll so echt und so effizient wie möglich umgesetzt werden. Momentan arbeiten wir am vierten Spinnenmodell.
Unsere Spinne als Problemstellung einer Abschlussarbeit
„spido“ befindet sich im Moment also noch in der Entwicklungs- und Optimierungsphase. Die Bewegungsabläufe der Beine sowie ein einfacher und robuster Aufbau sind dabei ein besonderes Thema. Peter studiert in Karlsruhe am KIT Maschinenbau und erforscht an diversen Modellentwürfen die Feinmotorik unseres Krabblers. Er arbeitet seit Mai 2015 an seiner Bachelorarbeit mit dem Titel:
"Entwicklung eines achtbeinigen Laufroboters als Elektronikbausatz und Experimentierplattform". Darin beschäftigt Peter sich also direkt mit unserem „spido“. Seine Aufgabenstellung basiert auf dem funktionsfähigen Prototyp unserer Spinne.
Ein neues CAD-Modell des Laufroboters entsteht gerade in Creo-Elements. Diverse Verbesserungen helfen den Kunden später „spido“ zuverlässig aufzubauen. Peter beschäftigt sich in seiner Arbeit auch mit der Wahl von geeigneten Komponenten und kosten-effizienten Herstellungsverfahren für eine Serienproduktion. Außerdem testet er weiterhin geeignete Simulations- und Optimierungsverfahren, um die Ergonomie der Laufbewegung zu verbessern. Er modelliert das Gangbild mittels Maple und Matlab und möchte so die Bewegungsergonomie optimieren. Ziel ist, dass sich die Spinne möglichst effektiv vorwärts bewegt, indem geeignete Winkel und Geometrien der Bein-Kinematik eruiert werden.
Er entwickelte bisher Formeln und Kurvenverläufe, so zum Beispiel zur Beinbewegung.

Nervenkitzel und der leichte Grusel

Wenn man sieht, wie „spido“ sich durch den Raum bewegt, stellt sich ein leichter Nervenkitzel ein. Spinnen sind faszinierende, gruselige Gesellen, die mit unseren Urängsten spielen:
„spidos“ Größe, die naturnah ausgeführten Bewegungen und die Tatsache, dass sie sich autonom bewegt, lassen einen schnell vergessen, dass es sich um einen Roboter handelt. Ein lebensechter
Eindruck entsteht. Denn „spido“ wird nicht ferngesteuert, sondern erkundet seine Umgebung mittels der eingebauten Sensoren und reagiert intelligent auf Hindernisse. Die Roboter-Spinne ist in der
Lage, jemanden hartnäckig zu verfolgen oder einer möglichen Gefährdung auszuweichen.

Diese Faszination für Spinnen treibt auch uns an, „spido“ auf den Markt zu bringen. Dann ist jeder in der Lage, alleine eine Spinne aus einem Baukastensystem zusammenzubauen. „spido“ wird ebenso
wie „tibo“ kein programmierbarer Rechner werden. Er funktioniert folglich ohne Mikrocontroller und Software. Durch den eigenständigen Aufbau werden grundsätzliches Hardwareverständnis und ein
Umgang mit Elektronik vermittelt. Fähigkeiten, die abhanden kommen, wenn man direkt in programmierbare Systeme einsteigt. Der Bastler übt seine Feinmotorik und „begreift“ Technik – dieses
haptische Lernen erfährt man am Computer nicht.
Ihr seid gefragt! Beeinflusst „spidos“ Entwicklung
Ihr könnt euch bei der Entwicklung noch über unseren Fragebogen einbringen und uns mitteilen, was euch
persönlich an einer Roboter-Spinne wichtig wäre. Wer weiß, vielleicht beeinflusst ihr mit eurem Feedback das Endergebnis. Wir freuen uns bereits sehr darauf, wenn „spido“ in Serie geht und zum
spielerischen Forschen und Entdecken einlädt.
Wen spricht „spido“ an?

Technikunterricht in Schulen kann nun spannender gestaltet werden. Aber auch Schülerlabore, Kinderunis, Berufsschulen und Technikzirkel könnte unsere Spinne bereichern.
Leute, die gerne basteln. Töchter, Söhne und Väter, die etwas bauen und erschaffen wollen. Am besten ein kriechendes „Haustier“, das alle Besucher verblüfft. „spido“ möchte nämlich gerne unterhalten: Vielleicht krabbelt die Robo-Spinne demnächst autonom auch durch deine Wohnung!
Hat dir der Blogbeitrag gefallen?
Abonniere unseren Newsletter oder folge uns auf Facebook oder Twitter.
Diesen Beitrag teilen
Kommentar schreiben
verena (Mittwoch, 25 November 2015 14:25)
echt genial!!! würde super gerne diese Spinne als Bausatz kaufen!!! Ich hoffe, ihr geht bald in Produktion damit :))))
Tino (Mittwoch, 25 November 2015 14:31)
Vielen Dank - das hoffe ich auch! Im Moment können wir aber leider noch nichts versprechen.