

Stell dir vor, Roboter könnten Lichtverhältnisse genauso wahrnehmen wie wir Menschen (Die Welt der Helligkeitswahrnehmung).
Anstatt sich nur auf absolute Helligkeitswerte zu verlassen, könnten sie relative Helligkeitsunterschiede nutzen, um ihre Umgebung besser zu verstehen und darauf zu reagieren. Doch wie lässt sich diese Fähigkeit technisch realisieren und welche Vorteile bringt sie mit sich?
Die Idee ist simpel, aber genial: Kombiniere zwei oder mehrere Sensoren mit unterschiedlichen Erfassungsbereichen in Gruppen. Anstatt absolute, unabhängige Helligkeitswerte wie bei klassischen Fahrrobotern zu erfassen, erhältst du so relative Informationen über die Umgebung. Diese relative Wahrnehmung ist der Schlüssel zur Anpassungsfähigkeit der Roboter.
So funktioniert es

Stell dir ein einfaches Roboterfahrzeug vor, ausgestattet mit zwei Helligkeitssensoren. Diese Sensoren bilden das Verhältnis der beiden Helligkeiten ab. Der relative Sensorwert beeinflusst die Geschwindigkeit der Motoren unterschiedlich: verstärkend auf einen Motor und hemmend auf den anderen. Bei gleichmäßiger Beleuchtung drehen die Motoren gleich schnell. Interessanterweise verändert sich die Geschwindigkeit des Roboters nicht, wenn er gerade auf eine Lichtquelle zufährt – ein Unterschied zu klassischen Braitenberg-Vehikeln. Mit einem dritten Sensor wäre dies jedoch auch möglich und gezielt einsetzbar.
Die Umsetzung
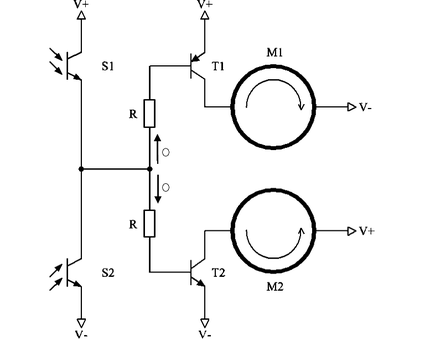
Die effektivste Methode eine relative Helligkeitsdetektion zu erreichen ist eine direkte physikalische Umsetzung. Unabhängig davon, ob du Fotowiderstände, Fotodioden oder Fototransistoren verwendest, kann die Kombination am einfachsten durch deren Reihenschaltung als Spannungsteiler realisiert werden.
So erhält du aus n Sensoren n−1 relative Helligkeitswerte. In dem nebenstehenden Beispiel ist eine einfache Schaltung mit zwei Fototransistoren (S1, S2) in Reihenschaltung und zwei Motoren (M1, M2) dargestellt.
Für detaillierte Informationen über diese Technik kannst du unser Patent „Verbesserte Steuerung für sich autonom fortbewegende Roboter“ (Nr. DE 102013104578 B3) nachlesen.
Warum relative Sensorik?
Du fragst dich vielleicht, warum man sich die Mühe machen sollte, relative statt absolute Sensorwerte zu verwenden. Der entscheidende Vorteil liegt in der Genauigkeit und Zuverlässigkeit. Ähnlich wie unser menschliches Auge Helligkeitsdifferenzen auf einer extrem großen Skala von 1:10 Milliarden wahrnehmen kann, ermöglicht die relative Sensorik eine gleichbleibend hohe Genauigkeit über den gesamten Arbeitsbereich der Sensoren. Sehr kleine absolute Signale wären hingegen viel störanfälliger und unzuverlässiger.
Anwendungsbeispiele

Unsere analogen Roboterbausätze, varikabi und varikabo, nutzen nicht nur zwei, sondern drei Fototransistoren (FT). Mit dem mittleren Sensor kann die Geschwindigkeit des Fahrzeugs variiert werden. Anders als bei
klassischen Braitenberg-Vehikeln ermöglicht die relative Sensorik vielfältige Verhaltensweisen in Bezug auf
Lichtquellen.
Je nach Ausrichtung der Sensoren und der Verschaltung der Sensorsignale mit den Motoren können die Roboter auch Linien am Boden oder Objekte mit geringen Helligkeitsunterschieden verfolgen oder
ausweichen. Schau dir diese Videos an, um einen Eindruck von den vielseitigen Anwendungen der Mini-Roboter zu gewinnen.
Fazit
Die Integration der relativen Helligkeitsdetektion in die Robotik eröffnet neue Dimensionen der Effizienz und Anpassungsfähigkeit. Durch die Kombination einfacher physikalischer Prinzipien mit moderner Technik können Roboter präziser und intelligenter agieren, was ihre Einsatzmöglichkeiten erheblich erweitert.
Lasst uns die einzigartigen Fähigkeiten der relativen Sensorik in der Robotik weiter erkunden und entwickeln! 🌟🤖
Hat dir der Blogbeitrag gefallen?
Abonniere meinen Newsletter oder Folge mir auf LinkedIn oder Facebook, um zukünftig keinen Blog mehr zu verpassen.
Kommentar schreiben