
Nach dem ersten Erfolg und den Herausforderungen mit tinobo stellte sich heraus: Für Kinder war tinobo zu teuer, und Erwachsene zögerten oft, sich mit der scheinbar komplexen und ihnen fremden Analogtechnik auseinanderzusetzen. Eine abgespeckte Version des hochwertigen Lötbausatzes musste her – mit klaren Zielen: deutlich günstiger, evtl. ohne Löten, einfacher im Aufbau, mit simpleren Schaltungen, aber weiterhin analog.

Erste Ideen: Insektenroboter auf dem Prüfstand
Die Suche nach einem neuen Konzept begann mit Experimenten. Ich blieb zunächst bei Operationsverstärkern als Herzstück der Steuerung. Daraus entstanden kleine Insektenroboter, die aus winzigen Motoren, einer Knopfbatterie, einem Operationsverstärker-Baustein und zwei bis vier Fototransistoren bestanden. Die Motoren waren schräg zum Boden geneigt, sodass die Roboter direkt auf der Motorwelle dahin schlitterten. Die Sensoren waren als gleitende „Beine“ gestaltet und konnten Strukturen am Boden und in der Umgebung erkennen.
Doch das Konzept war nicht praxistauglich. Die Sensoren reagierten zu spät, und die blitzschnellen Motoren reagierten zu träge. Außerdem erforderte das Design einen absolut glatten Untergrund, und die Haftung auf den Motorwellen war unzureichend.

Der Durchbruch: Ein minimalistischer Ansatz
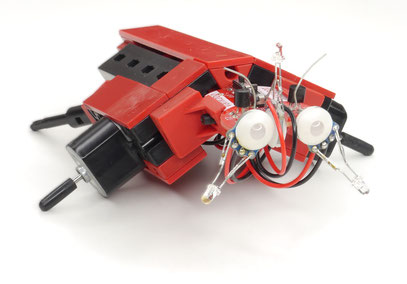
2016 reifte die Idee eines simplen Roboterbausatzes, der schnell und einfach zusammengebaut werden konnte. Die Grundlage war ein minimalistisches Fahrwerk: Zwei Motoren wurden mit einem einfachen Metallwinkel verbunden und im 45°-Winkel zum Boden angeordnet. Für besseren Grip zog ich Schläuche über die Motorwellen. Eine 9V-Batterie kam davor, und alles wurde mit Kabelbindern fixiert. Ein zusätzlicher Kabelbinder diente als Gleitkufe.
Der entscheidende Schritt war die Wahl der Motoren. Ich entdeckte in einem Pollin-Katalog Motoren ohne Getriebe mit besonders langsamer Drehzahl – eine günstige Alternative zu teuren Getriebemotoren. Später stellte sich allerdings heraus, dass die dauerhafte Beschaffung dieser speziellen Motoren schwieriger war als erwartet.
T2-R2: Der erste Prototyp
Die Steuerung war denkbar einfach: zwei Transistoren und zwei Widerstände, direkt an die Motorkontakte gelötet.
Ich nannte den kleinen Bot „T2-R2“. Lustigerweise basierte die Schaltung auf einer Idee aus meinem Patent zur relativen Sensorsteuerung, die ich bis dahin noch nie praktisch umgesetzt hatte.
Zwei Lichtsensoren wurden mit einfachen Kabelschellen variabel befestigt, wodurch T2-R2 Hindernissen ausweichen, Linien und Gegenständen folgen oder Lichtquellen nachfahren konnte. Auf der Maker Faire Hannover im Mai 2016 war das Interesse an den Workshops riesig. Dies bestärkte mich, das Konzept weiterzuentwickeln.

Der Schlüssel: Flexible Sensoren
Die flexible Anbringung der Sensoren erwies sich als Schlüssel zum Erfolg. Mit den gleichen Sensoren konnte der Roboter Linien, Hindernisse oder Lichtquellen am Boden, vor oder über sich erkennen. Ein dritter Sensor ermöglichte nun sogar Geschwindigkeitsanpassungen. Doch wie sollten die Sensoren praktikabel so befestigt werden, dass sie sich flexibel ausrichten ließen?

Die Lösung fand ich schließlich in Gummitüllen, die zusammen mit zwei LEDs als Rotationsachsen für die seitlichen Sensoren dienten. Durch Vertauschen dieser Sensoren konnte man zwischen dem Lichtfolger und dem Schattenfolger Modus wählen. Der mittlere Sensor nutzte den Vorwiderstand der LEDs als Drehachse. Mit einem Schalter konnte zudem, zwischen dem Brems- und dem Beschleunigungsmodus gewechselt werden, um das Verhalten des Roboters weiter zu variieren.

Vom Prototyp zur Serie
Der minimalistische Ansatz mit direkt aufgelöteter Elektronik war nicht mehr praktikabel. Ich entwarf einen Prototyp Namens kabibo (KabelbinderBot) mit Lochrasterplatinen, den ich nach erfolgreichen Tests in eine Kleinserie überführte. Drei kleine Platinen für die schwenkbaren Sensoren ergänzten das Design. Diese Serie wurde in einem Schulprojekt mit 30 Schülern erprobt, was den Erfolg des Konzepts bestätigte.
Nach einer weiteren Optimierungsrunde wurde der Lötbausatz varikabo getauft. Um die Beschaffung der speziellen Motoren mit geringer Drehzahl und langen Achsen sicherzustellen, ließ ich diese schon bald eigens produzieren. Die ausführliche Bauanleitung erhielt zahlreiche CAD-Darstellungen, die den Aufbau und die 12 Funktionen des Roboters Schritt für Schritt erklärten.

Der Markteintritt
Mitte 2017 feierte varikabo seine Premiere auf der Maker Faire Bodensee und stieß auf großes Kaufinteresse unter den technikbegeisterten Besuchern.
Ende des Jahres folgte dann noch eine Fischertechnik-Version: varikabo-FT. Hier wurden Motoren, Batterie und Elektronik mit originalen Fischertechnik-Bausteinen kombiniert, um ein schnittiges Insektenwesen zu formen.
varikabo ist der Beweis, dass minimalistische Ansätze, kreatives Experimentieren und die Liebe zur Technik zu großartigen Ergebnissen führen können – ein Meilenstein in der Geschichte von VARIOBOT.
Hat dir der Blogbeitrag gefallen?
Abonniere meinen Newsletter oder Folge mir auf LinkedIn, Instagram, Facebook oder X, um zukünftig keinen Blog mehr zu verpassen.
Kommentar schreiben